SIMP example: Point Load Cantilever
This example is also available as a Jupyter notebook: simp.ipynb
Commented Program
What follows is a program spliced with comments. The full program, without comments, can be found in the next section.
using TopOptDefine the problem
E = 1.0 # Young’s modulus
v = 0.3 # Poisson’s ratio
f = 1.0; # downward force
nels = (30, 10, 10)
problem = PointLoadCantilever(Val{:Linear}, nels, (1.0, 1.0, 1.0), E, v, f);See also the detailed API of PointLoadCantilever:
TopOpt.TopOptProblems.PointLoadCantilever — Type
///**********************************
///* *
///* * |
///* * |
///********************************** v
struct PointLoadCantilever{dim, T, N, M} <: StiffnessTopOptProblem{dim, T}
rect_grid::RectilinearGrid{dim, T, N, M}
E::T
ν::T
ch::ConstraintHandler{<:DofHandler{dim, <:Cell{dim,N,M}, T}, T}
force::T
force_dof::Integer
black::AbstractVector
white::AbstractVector
varind::AbstractVector{Int}
metadata::Metadata
enddim: dimension of the problemT: number type for computations and coordinatesN: number of nodes in a cell of the gridM: number of faces in a cell of the gridrect_grid: a RectilinearGrid structE: Young's modulusν: Poisson's rationforce: force at the center right of the cantilever beam (positive is downward)force_dof: dof number at which the force is appliedch: aFerrite.ConstraintHandlerstructmetadata: Metadata having various cell-node-dof relationshipsblack: aBitVectorof length equal to the number of elements whereblack[e]is 1 iff thee^th element must be part of the final designwhite: aBitVectorof length equal to the number of elements wherewhite[e]is 1 iff thee^th element must not be part of the final designvarind: anAbstractVector{Int}of length equal to the number of elements wherevarind[e]gives the index of the decision variable corresponding to elemente. Because some elements can be fixed to be black or white, not every element has a decision variable associated.
Parameter settings
V = 0.3 # volume fraction
xmin = 1e-6 # minimum density
rmin = 2.0; # density filter radiusDefine a finite element solver
penalty = TopOpt.PowerPenalty(3.0)
solver = FEASolver(Direct, problem; xmin=xmin, penalty=penalty)Define compliance objective
comp = TopOpt.Compliance(solver)
filter = DensityFilter(solver; rmin=rmin)
obj = x -> comp(filter(PseudoDensities(x)))#2 (generic function with 1 method)Define volume constraint
volfrac = TopOpt.Volume(solver)
constr = x -> volfrac(filter(PseudoDensities(x))) - V#5 (generic function with 1 method)Define subproblem optimizer
x0 = fill(V, length(solver.vars))
model = Model(obj)
addvar!(model, zeros(length(x0)), ones(length(x0)))
add_ineq_constraint!(model, constr)
alg = MMA87()
convcriteria = Nonconvex.KKTCriteria()
options = MMAOptions(;
maxiter=3000, tol=Nonconvex.Tolerance(; x=1e-3, f=1e-3, kkt=0.001), convcriteria
)
r = optimize(model, alg, x0; options)
@show obj(r.minimizer)42.23812907385255(Optional) Visualize the result using Makie.jl
Need to run using Pkg; Pkg.add("Makie") first and either Pkg.add("CairoMakie") or Pkg.add("GLMakie")
using Makie
using CairoMakiealternatively, using GLMakie
fig = visualize(
problem;
topology=r.minimizer,
default_exagg_scale=0.07,
scale_range=10.0,
vector_arrowsize=0.5,
)
Makie.display(fig)CairoMakie.Screen{IMAGE}
or convert it to a Mesh Need to run using Pkg; Pkg.add(GeometryBasics) first
using Makie, GeometryBasics
result_mesh = GeometryBasics.Mesh(problem, r.minimizer);
Makie.mesh(result_mesh)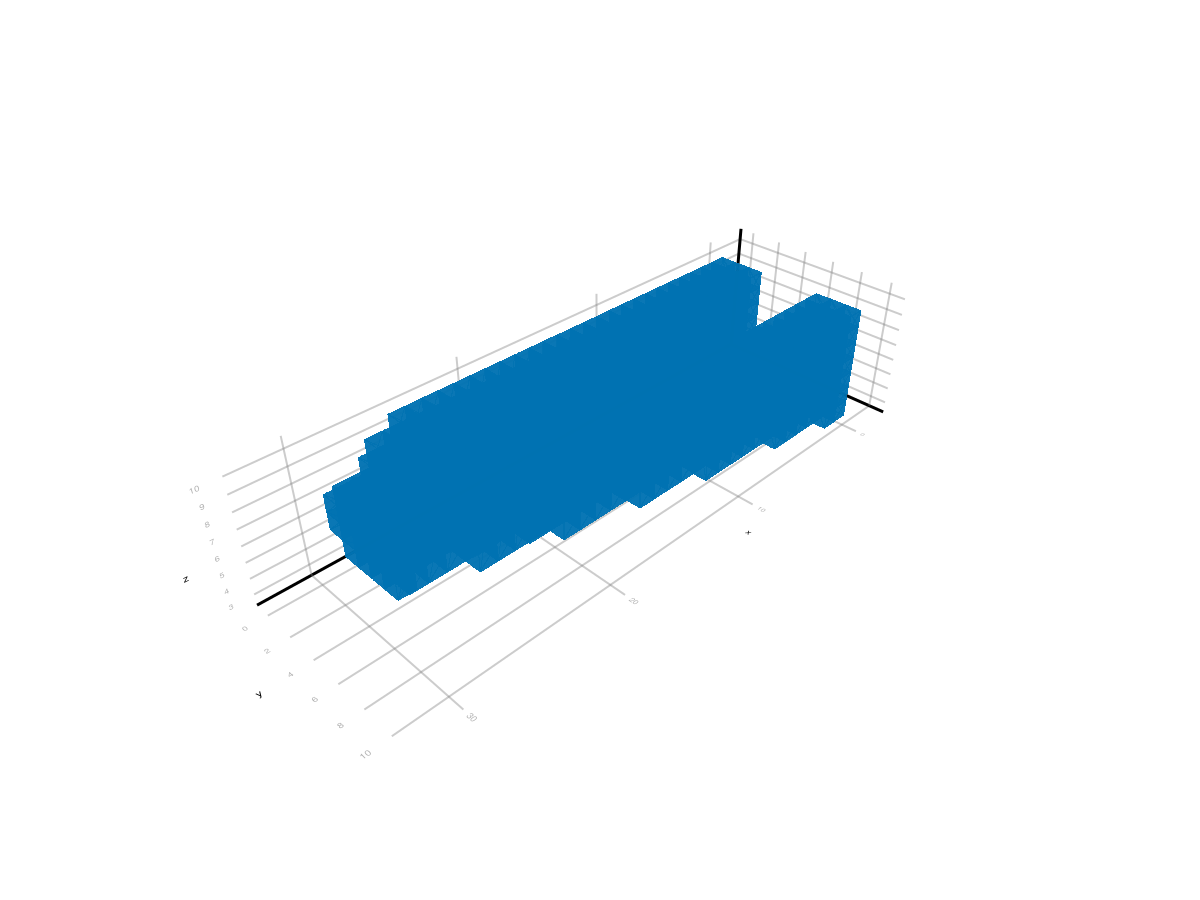
Plain Program
Below follows a version of the program without any comments. The file is also available here: simp.jl
using TopOpt
E = 1.0 # Young’s modulus
v = 0.3 # Poisson’s ratio
f = 1.0; # downward force
nels = (30, 10, 10)
problem = PointLoadCantilever(Val{:Linear}, nels, (1.0, 1.0, 1.0), E, v, f);
V = 0.3 # volume fraction
xmin = 1e-6 # minimum density
rmin = 2.0; # density filter radius
penalty = TopOpt.PowerPenalty(3.0)
solver = FEASolver(Direct, problem; xmin=xmin, penalty=penalty)
comp = TopOpt.Compliance(solver)
filter = DensityFilter(solver; rmin=rmin)
obj = x -> comp(filter(PseudoDensities(x)))
volfrac = TopOpt.Volume(solver)
constr = x -> volfrac(filter(PseudoDensities(x))) - V
x0 = fill(V, length(solver.vars))
model = Model(obj)
addvar!(model, zeros(length(x0)), ones(length(x0)))
add_ineq_constraint!(model, constr)
alg = MMA87()
convcriteria = Nonconvex.KKTCriteria()
options = MMAOptions(;
maxiter=3000, tol=Nonconvex.Tolerance(; x=1e-3, f=1e-3, kkt=0.001), convcriteria
)
r = optimize(model, alg, x0; options)
@show obj(r.minimizer)
using Makie
using CairoMakie
fig = visualize(
problem;
topology=r.minimizer,
default_exagg_scale=0.07,
scale_range=10.0,
vector_arrowsize=0.5,
)
Makie.display(fig)
using Makie, GeometryBasics
result_mesh = GeometryBasics.Mesh(problem, r.minimizer);
Makie.mesh(result_mesh)
# This file was generated using Literate.jl, https://github.com/fredrikekre/Literate.jlThis page was generated using Literate.jl.